Revista tecnologica GeoTec
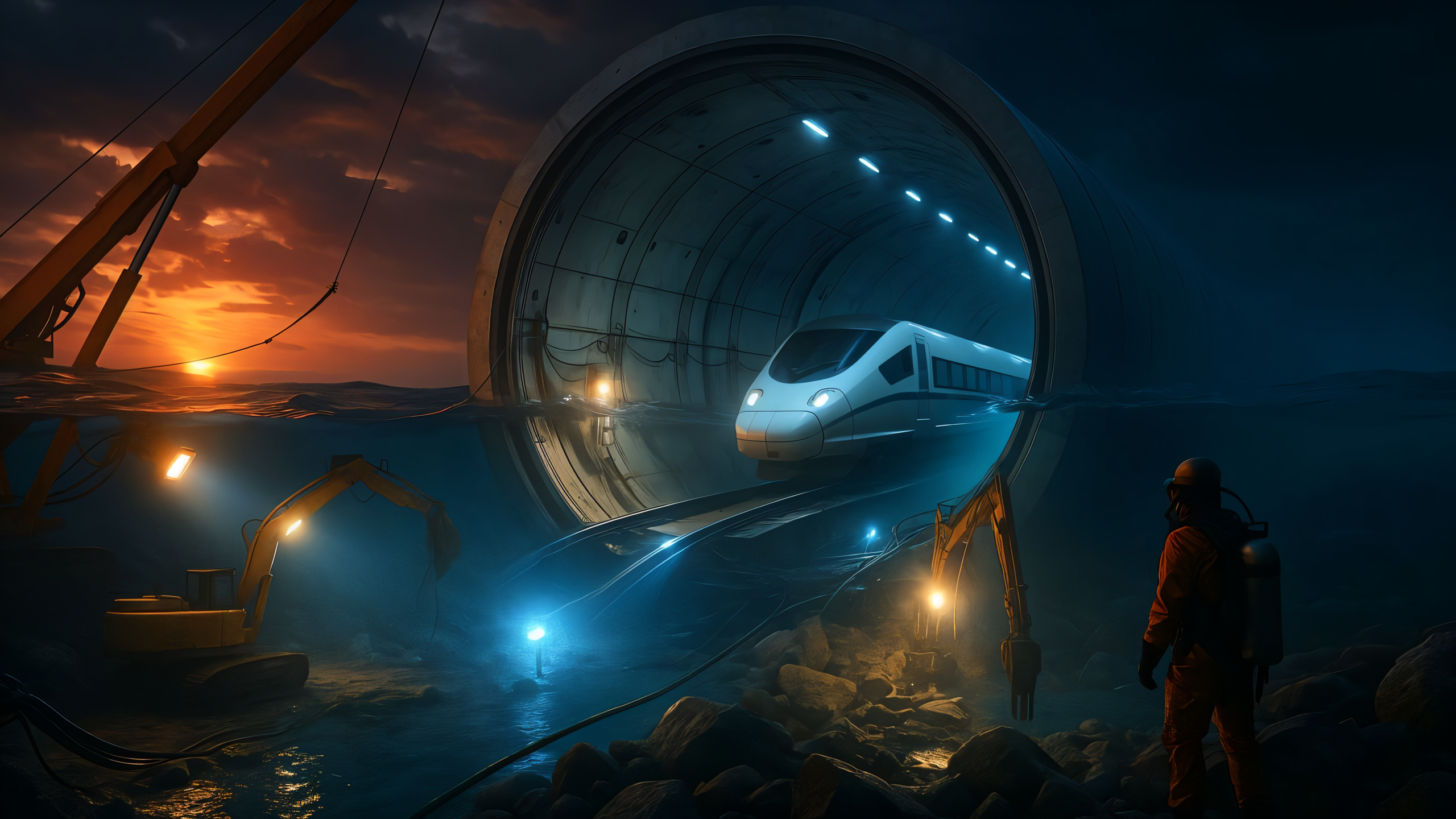
China avanza en la construcción del túnel submarino más largo del mundo
China avanza en la construcción del túnel submarino de alta velocidad más grande del mundo China continúa marcando hitos en


China avanza en la construcción del túnel submarino de alta velocidad más grande del mundo China continúa marcando hitos en

Hace apenas unos años, la idea de que un puerto pudiera operar sin personal en el terreno parecía imposible. Hoy,

China ha comenzado las pruebas del CR450, su nuevo tren de alta velocidad que promete alcanzar los 400 km/h, posicionándose